システム創成講座・システム構造研究室(DSS22)
神戸大学大学院システム情報学研究科システム科学専攻,神戸大学工学部情報知能工学科
神戸大学大学院システム情報学研究科システム科学専攻,神戸大学工学部情報知能工学科
Sensing Group
本グループの指導教員は中本です.個人ページも参照してください.
触感・食感の解明
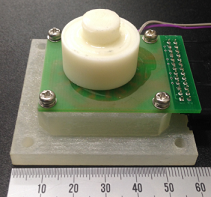
計測をもとにした様々な研究を推進しています.触感・食感の知覚と計測,推定に関する研究では,触覚センサの開発や信号処理方法の確立,低分解能なセンサを利用して高分解能情報を得る方法の提案を行っています.食感の研究では,触覚や聴覚からなる多感覚統合の理解とそれを模倣する計測システム,推定方法を提案しています.例えば,下の写真はヒトの歯の構造と受容器の特性を模した食感センサです.この食感センサは2種類のセンサ素子の出力を用いて咀嚼時の荷重と振動を計測することができます.この特性を応用して我々は「パリパリ」や「サクサク」といった食感の判別も可能なことを実験的に検証してきました.現在は「モチモチ」などヒトが感じている食感の定量化の方法についても研究を進めています.この研究の一部は,企業と共同で推進しています.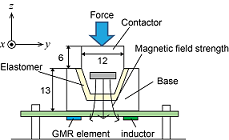
超音波による非破壊計測と可視化
ピエゾ素子による超音波センサや電磁力によって超音波を発生させる電磁超音波探触子を用いて,非破壊で物体の内部の状態を可視化する方法の研究を推進しています.東北大学や神戸市,フランスのINSA Lyonとの共同研究です.
多種センサによる技能評価
複数の異なる種類のセンサを用いて,技能者の動作を計測し,解析によって技能を評価する方法の研究を推進しています.また,様々なセンサを利用して装着物から受ける負荷を計測値から推定する方法の提案もしています.
分布型圧力センサ
多指ロボットハンド用分布型触覚センサの研究を行っています.素材には感圧導電性ゴムを利用し,接触時の圧力分布を電気抵抗値変化分布として計測しています.5本指をもつロボットフィンガに適用するために,フレキシブル基板で電極を製作し,指先や指の側面での計測を可能としています.計測点数は指先部分で204点あり,フィンガ全体では524点です.これまで,操作中の物体の形状識別や書字の際のペン把持制御へ応用しています.

