恄屗戝妛戝妛堾僔僗僥儉忣曬妛尋媶壢 僔僗僥儉忣曬妛愱峌 嫟憂僔僗僥儉忣曬妛島嵗
CS61b 塝媣曐 尋媶幒
VTOL宆UAV偺尋媶奐敪


岞塿嵿抍朄恖JKA偺曗彆乮僆乕僩儗乕僗乯傪庴偗偰VTOL宆僪儘乕儞偺崅婡摦旘峴惂屼偵娭偡傞尋媶傪幚巤偟傑偟偨丅乮椷榓5擭搙乯
傑偨丄岞塿嵿抍朄恖JKA偺曗彆乮嫞椫乯傪庴偗偰VTOL宆僪儘乕儞偺尋媶奐敪傪幚巤偟傑偟偨丅乮暯惉29擭搙乣30擭搙乯
椷榓5擭搙偺曗彆帠嬈偵傛傞尋媶撪梕偍傛傃惉壥偵偮偄偰偼偙偪傜(PDF)偵傑偲傔偰偄傑偡丅
暯惉29擭搙乣30擭搙偺曗彆帠嬈偵傛傞尋媶撪梕偍傛傃惉壥偵偮偄偰偼偙偪傜(PDF)偵傑偲傔偰偄傑偡丅
戝婯柾嵭奞敪惗帪偼丄旐嵭抧偑峀斖埻側抧堟偵揰嵼偡傞偙偲偑憐掕偝傟傑偡丅
恦懍偐偮徻嵶側忣曬廂廤傗墦曽傊偺嬞媫暔帒桝憲傪幚尰偡傞偨傔偵偼丄尰嵼偺儅儖僠僐僾僞宆偺僪儘乕儞(UAV, Unmanned Aerial Vehicle)偼
旘峴懍搙丄峲懕嫍棧偺揰偱晄廫暘偱偡丅偦偙偱丄旘峴婡乮屌掕梼婡乯偺傛偆側岠棪揑偐偮崅懍側挿嫍棧堏摦惈擻偲丄
儅儖僠僐僾僞乮夞揮梼婡乯偺傛偆側儂僶儕儞僌惈擻傪暪偣帩偮帺棩旘峴壜擻側VTOL宆UAV偺尋媶奐敪傪峴偭偰偄傑偡丅

2010擭傛傝僥傿儖僩儘乕僞僞僀僾偺婡懱奐敪傪恑傔丄2015擭偵偼僄傾儘僙儞僗姅幃夛幮偲嫟摨奐敪傪峴偄丄
VTOL(Vertical Take Off and Landing)婡偲偟偰夞揮梼婡儌乕僪偱偺棧棨偐傜丄屌掕梼婡儌乕僪偵慗堏偟偰偺崅懍旘峴丄
夞揮梼婡儌乕僪偵栠偭偰偺拝棨傑偱傪幚尰偟傑偟偨丅尰嵼偼丄偙偺婡懱偵壛偊偰丄擇廳悇恑僞僀僾偺婡懱丄僥傿儖僩僂傿儞僌僞僀僾偵懳徾傪峀偘偰丄旘峴椡妛傗旘峴惂屼偺尋媶傪恑傔偰偄傑偡丅
2023擭偵偼僄傾儘僙儞僗姅幃夛幮偲偺崌摨僠乕儉偱IFAC/ARF World Drone Competition偵嶲壛偟傑偟偨丅
僙儞僒斍
搵嵹僔僗僥儉偺峔抸
UAV偺帺棩旘峴傪幚尰偡傞偨傔偵偼丄僙儞僒抣偺撉傒庢傝丄旘峴忬懺偺悇掕丄惂屼寁嶼丄僒乕儃傗僗僺乕僪僐儞僩儘乕儔傊偺巜椷抣憲怣偲偄偆堦楢偺棳傟傪儕傾儖僞僀儉偵張棟偡傞昁梫偑偁傝傑偡丅
UAV偵媮傔傜傟傞僞僗僋偼懡條壔偟偰偍傝丄忈奞暔夞旔傗埨慡側帺摦拝棨側偳偺偨傔偵丄傛傝懡偔偺僙儞僒忣曬傪摑崌偟崅搙側張棟傪偡傞偙偲偑媮傔傜傟偰偄傑偡丅
僙儞僒斍偼丄昁梫側搵嵹僙儞僒僔僗僥儉傗傾儖僑儕僘儉偵偮偄偰尋媶傪恑傔偰偄傑偡丅

奼挘僇儖儅儞僼傿儖僞傪梡偄偨旘峴忬懺悇掕
UAV偺帺棩旘峴偵偼旘峴忬懺偺悇掕偑昁梫偱偁傝丄峲嬻婡偺姷惈峲朄僔僗僥儉偱偼丄埵抲傗巔惃偺悇掕偵僇儖儅儞僼傿儖僞偑峀偔梡偄傜傟偰偄傑偡丅 尰嵼偱偼巗斕偺僆乕僩僷僀儘僢僩偱壜擻偱偡偑丄UAV奐敪傪巒傔偨摉弶偼丄MEMS媄弍偵傛傞彫宆寉検偺僙儞僒傪梡偄偰丄婡懱偺埵抲丄懍搙丄巔惃傪悇掕偡傞奼挘僇儖儅儞僼傿儖僞傪 峔抸偟偰偄傑偟偨丅偙偺尋媶偺敪揥偲偟偰丄GNSS塹惎偺攝抲偵墳偠偨僇儖儅儞僼傿儖僞偺峔抸曽朄偵娭偡傞尋媶傪尰嵼偼恑傔偰偄傑偡丅
埨慡側拝棨岓曗抧揰偺帺摦専弌
屘忈帪偺嬞媫拝棨丄嵭奞帪偺嬞媫暔帒桝憲偵偍偄偰偼丄枹抦娐嫬傊偺拝棨偑憐掕偝傟傑偡丅 傎偲傫偳偡傋偰偺僪儘乕儞偵搵嵹偝傟傞僇儊儔偐傜偺夋憸傪梡偄偰丄埨慡偵拝棨壜擻側抧昞椞堟傪拪弌偟丄拝棨岓曗抧揰傪帺摦専弌偡傞媄弍偵偮偄偰尋媶偟偰偄傑偡丅 婡夿妛廗偵傛傞抧昞僋儔僗暘椶丄僆僾僥傿僇儖僼儘乕偵傛傞抧昞宍忬昡壙側偳傪梡偄偨拝棨埨慡惈偺昡壙傪峴偭偰偄傑偡丅
惂屼斍
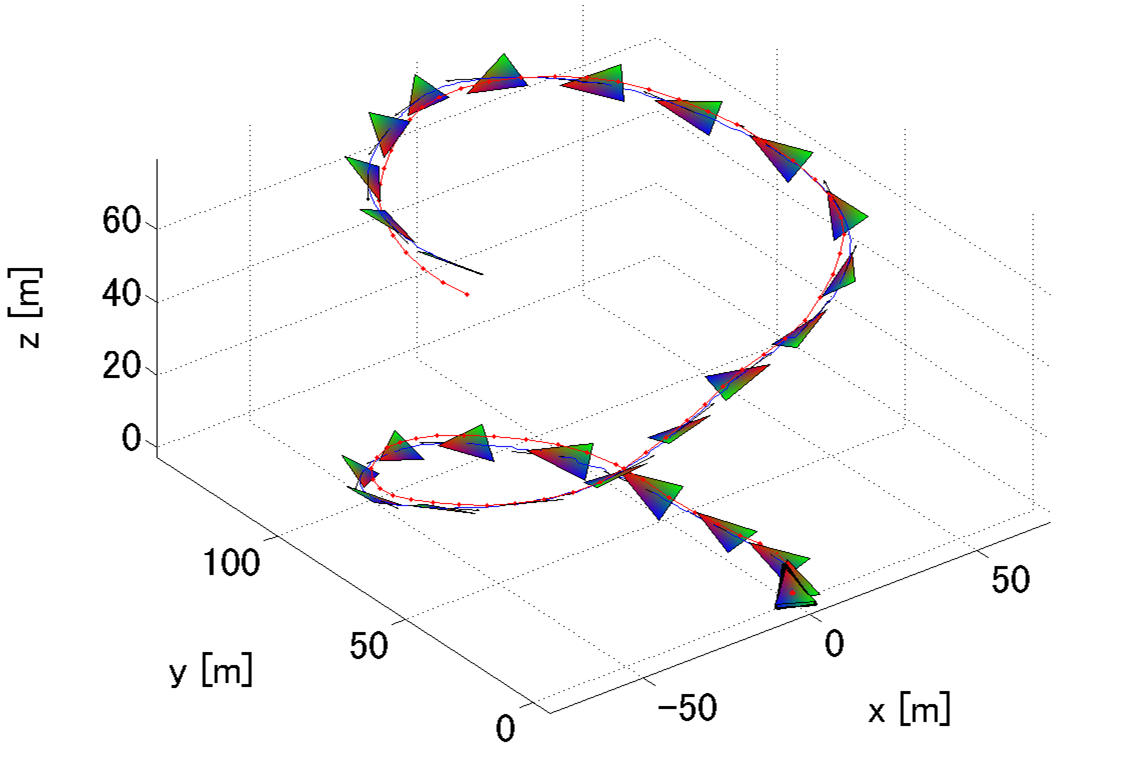
旘峴椡妛儌僨儖偺峔抸
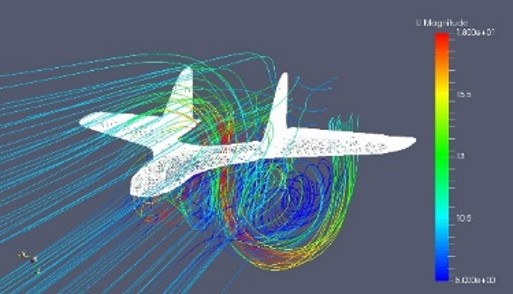
VTOL婡偼丄掅懍儂僶儕儞僌偐傜崅懍旘峴傑偱暆峀偄懍搙堟傪丄敪惗偝偣傞儘乕僞悇椡偺岦偒傪曄偊側偑傜旘峴偟傑偡丅 婡懱偵壛傢傞嬻婥椡偼嬌傔偰暋嶨偵曄壔偟傑偡偑丄傛傝旘峴岠棪偺崅偄婡懱傊偺夵椙丄埨掕偟偨帺棩旘峴偺幚尰偺偨傔偵偼丄偙偺嬻婥椡傪攃埇偡傞偙偲偑廳梫偱偡丅 旘峴幚尡僨乕僞偐傜條乆側旘峴忬懺偵偍偗傞嬻婥椡傪僔僗僥儉摨掕庤朄偵傛偭偰悇掕偡傞偲偲傕偵丄CFD(Computational Fluid Dynamics)夝愅傪梡偄偰丄 奐敪婡偺嬻椡摿惈偺夝柧偵庢傝慻傫偱偄傑偡丅
旘峴惂屼懃偺峔抸
VTOL宆UAV偱偼丄夞揮梼婡儌乕僪丄旘峴儌乕僪娫偺慗堏丄屌掕梼婡儌乕僪偺偡傋偰偵偍偄偰丄埨掕偟偨旘峴傪壜擻偲偡傞 旘峴惂屼宯偑媮傔傜傟傑偡丅夞揮梼婡儌乕僪偱偼丄儅儖僠僐僾僞偵斾傋傞偲丄庡梼傗旜梼偑晽奜棎傪庴偗傗偡偔側傝傑偡偟丄 儌乕僪娫慗堏帪偺嬻婥椡偵偼枹夝柧側晹暘偑懡偄偱偡丅忋弎偺儌僨儖壔偲傛傝崅搙側惂屼宯偵傛偭偰丄 偙偺庬偺UAV偑杮棃帩偮旘峴惈擻傪堷偒弌偡偨傔偺旘峴惂屼宯偺峔抸傪栚巜偟偰偄傑偡丅

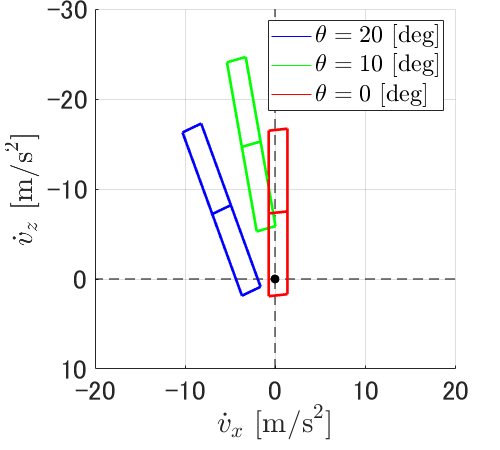
Maneuverability夝愅偵傕偲偯偔崅婡摦旘峴
VTOL宆UAV偵偼丄奺旘峴儌乕僪偺偨傔偺傾僋僠儏僄乕僞偑搵嵹偝傟偰偍傝丄惂屼擖椡偼忕挿偲側傞偙偲偑懡偄偱偡丅 廬棃偺旘峴偱偼奺旘峴儌乕僪偵偍偄偰巊梡偡傞傾僋僠儏僄乕僞偑寛傔傜傟偰偍傝丄偙偺忕挿惈傪妶梡偟偨偲偒偺 旘峴惈擻偵偮偄偰偼廫暘偵柧傜偐偵偝傟偰偄傑偣傫丅搵嵹傾僋僠儏僄乕僞傪嵟戝尷偵妶梡偟偨偲偒偺婡摦惈傪夝愅偟丄 條乆側傾僋僠儏僄乕僞攝抲偺VTOL宆UAV偑帩偮旘峴惈擻偺夝柧傪恑傔偰偄傑偡丅
幱帿
杮尋媶傪恑傔傞偵偁偨傝懡偔偺奆偝傑偍傛傃嵿抍偺偛巟墖傪偄偨偩偄偰偄傑偡丅偙偙偵姶幱怽偟忋偘傑偡丅
- 岞塿嵿抍朄恖JKA曗彆帠嬈丆椷榓5擭搙
- 愳惣婰擮怴柧榓嫵堢嵿抍尋媶彆惉丆椷榓3擭搙
- 岞塿嵿抍朄恖憃梩揹巕婰擮嵿抍丆暯惉31擭搙丆椷榓2擭搙
- 岞塿嵿抍朄恖JKA曗彆帠嬈丆暯惉29乣30擭搙
- 嶰朙壢妛媄弍怳嫽嫤夛尋媶彆惉丆暯惉28擭搙
- 埳摗拤暫塹婎嬥妛弍尋媶彆惉嬥丆尋媶戙昞幰丆暯惉27擭搙
- JR惣擔杮偁傫偟傫幮夛嵿抍尋媶彆惉丆暯惉27擭搙
- 憅揷婰擮擔棫壢妛媄弍嵿抍憅揷彠椼嬥丆暯惉24擭搙
- 僗僘僉嵿抍壢妛媄弍尋媶彆惉嬥丆暯惉24擭搙
- 愳惣婰擮怴柧榓嫵堢嵿抍尋媶彆惉丆暯惉24擭搙
- 娭惣僄僱儖僊乕丒儕僒僀僋儖壢妛尋媶怳嫽嵿抍尋媶彆惉丆暯惉22擭搙